Corrigé de l’exercice 1
Partie A
Représenter la situation par un arbre pondéré.
On traduit les données de l’énoncé.
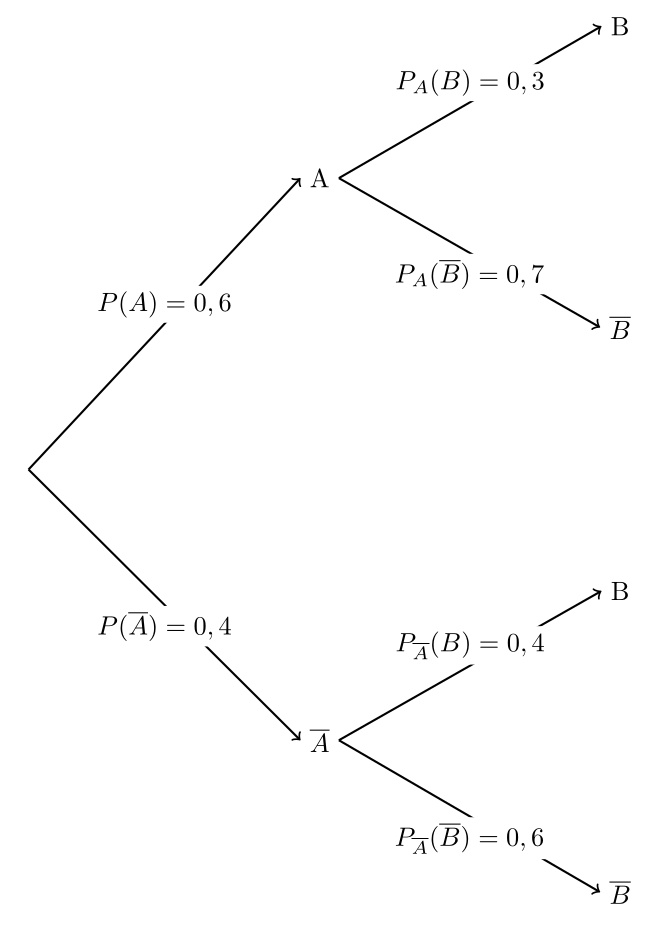
Soient les événements \(A\) : « La personne chute pendant la première séance » et \(B\) : « La personne chute pendant la deuxième séance ».
On a \(P(A) = 0,6\). Par conséquent, la probabilité de l’événement contraire \(\overline{ A}\) est \(P(\overline{ A}) = 1 - P(A) = 1 - 0,6 = 0,4\).
L’énoncé nous donne les probabilités conditionnelles suivantes :
- La probabilité que la personne chute pendant la deuxième séance sachant qu’elle a chuté pendant la première est \(P_A(B) = 0,3\).
- La probabilité que la personne chute pendant la deuxième séance sachant qu’elle n’a pas chuté pendant la première est \(P_{\overline{ A}}(B) = 0,4\).
On peut en déduire les probabilités des événements contraires :
- \(P_A(\overline{ B}) = 1 - P_A(B) = 1 - 0,3 = 0,7\).
- \(P_{\overline{ A}}(\overline{ B}) = 1 - P_{\overline{ A}}(B) = 1 - 0,4 = 0,6\).
L’arbre pondéré représentant la situation est le suivant :
Calculer la probabilité \(P(\overline{ A} \cap \overline{ B})\) et interpréter le résultat.
AstuceRappel : Probabilité d’une intersectionPour deux événements \(A\) et \(E\), la probabilité de leur intersection est donnée par la formule : \(P(A \cap E) = P(A) \times P_A(E)\).
Cette valeur correspond à la probabilité du chemin passant par \(A\) puis \(E\) dans un arbre pondéré.
On cherche la probabilité de l’événement \(\overline{ A} \cap \overline{ B}\) : « La personne ne chute ni pendant la première séance ni pendant la deuxième séance ».
D’après la formule des probabilités composées, on a : \[P(\overline{ A} \cap \overline{ B}) = P(\overline{ A}) \times P_{\overline{ A}}(\overline{ B})\] \[P(\overline{ A} \cap \overline{ B}) = 0,4 \times 0,6 = 0,24\]
La probabilité que la personne choisie au hasard ne chute lors d’aucune des deux séances est de 0,24.
Montrer que \(P(B) = 0,34\).
AstuceRappel : Formule des probabilités totalesSi les événements \(A_1, A_2, ..., A_n\) forment une partition de l’univers, alors pour tout événement \(E\), on a : \(P(E) = P(A_1 \cap E) + P(A_2 \cap E) + ... + P(A_n \cap E)\).
Dans le cas d’un événement \(A\) et de son contraire \(\overline{ A}\), la formule se simplifie en : \(P(E) = P(A \cap E) + P(\overline{ A} \cap E)\).
L’événement \(B\) peut se réaliser de deux manières exclusives : soit la personne a chuté à la première séance et à la deuxième (\(A \cap B\)), soit elle n’a pas chuté à la première mais a chuté à la deuxième (\(\overline{ A} \cap B\)).
Les événements \(A\) et \(\overline{ A}\) formant une partition de l’univers, on peut utiliser la formule des probabilités totales : \[P(B) = P(A \cap B) + P(\overline{ A} \cap B)\]
On calcule \(P(A \cap B)\) :
\[P(A \cap B) = P(A) \times P_A(B) = 0,6 \times 0,3 = 0,18\]
On calcule \(P(\overline{ A} \cap B)\) : \[P(\overline{ A} \cap B) = P(\overline{ A}) \times P_{\overline{ A}}(B) = 0,4 \times 0,4 = 0,16\] On peut maintenant calculer \(P(B)\) : \[P(B) = 0,18 + 0,16 = 0,34\] On a bien montré que \(P(B) = 0,34\).
La personne ne chute pas pendant la deuxième séance de cours. Calculer la probabilité qu’elle n’ait pas chuté lors de la première séance.
On cherche à calculer la probabilité que la personne n’ait pas chuté lors de la première séance, sachant qu’elle n’a pas chuté lors de la deuxième. Il s’agit de la probabilité conditionnelle \(P_{\overline{ B}}(\overline{ A})\).
AstuceRappel : Probabilité conditionnelleLa probabilité de l’événement \(E\) sachant l’événement \(F\) est donnée par : \[P_F(E) = \frac{P(E \cap F)}{P(F)}\]
La formule est donc : \[P_{\overline{ B}}(\overline{ A}) = \frac{P(\overline{ A} \cap \overline{ B})}{P(\overline{ B})}\] Calculons les deux termes :
- Le numérateur, en suivant la branche correspondante de l’arbre : \(P(\overline{ A} \cap \overline{ B}) = P(\overline{ A}) \times P_{\overline{ A}}(\overline{ B}) = 0,4 \times 0,6 = 0,24\).
- Le dénominateur, en utilisant l’événement contraire de \(B\) : \(P(\overline{ B}) = 1 - P(B) = 1 - 0,34 = 0,66\).
On obtient alors : \[P_{\overline{ B}}(\overline{ A}) = \frac{0,24}{0,66} = \frac{24}{66} = \frac{4}{11}\] En arrondissant au millième, on a : \[P_{\overline{ B}}(\overline{ A}) \approx 0,364\] La probabilité que la personne n’ait pas chuté à la première séance sachant qu’elle n’a pas chuté à la deuxième est d’environ 0,364.
Étude d’une variable aléatoire \(X\).
- Montrer que la variable aléatoire \(X\) suit une loi binomiale dont on précisera les paramètres.
Soit l’événement \(S\) : « la personne n’a chuté ni lors de la première ni lors de la deuxième séance ». Cet événement correspond à \(\overline{ A} \cap \overline{ B}\). L’énoncé admet que la probabilité de cet événement est \(p = P(S) = P(\overline{ A} \cap \overline{ B}) = 0,24\). (Nous l’avions calculé à la question précédente).
On répète \(n=100\) fois de manière identique et indépendante une épreuve de Bernoulli (le choix d’une personne est assimilé à un tirage avec remise).
- L’épreuve de Bernoulli consiste à choisir une personne et à regarder si l’événement \(S\) est réalisé (succès) ou non (échec).
- La probabilité du succès est constante et vaut \(p=0,24\).
- Les épreuves sont indépendantes.
La variable aléatoire \(X\), qui compte le nombre de succès (le nombre de personnes n’ayant pas chuté) au cours de ces 100 répétitions, suit donc une loi binomiale de paramètres \(n=100\) et \(p=0,24\).
On note \(X \sim \mathcal{B}(100 \,;\, 0,24)\).
- Quelle est la probabilité d’avoir, dans un échantillon de 100 personnes, au moins 20 personnes qui ne chutent ni lors de la première ni lors de la deuxième séance ?
On cherche à calculer \(P(X \geqslant 20)\).
Il est plus simple de passer par l’événement contraire : \[P(X \geqslant 20) = 1 - P(X < 20) = 1 - P(X \leqslant 19)\] À l’aide de la calculatrice, on utilise la fonction de répartition de la loi binomiale pour calculer \(P(X \leqslant 19)\). Avec les paramètres \(n=100\) et \(p=0,24\), on obtient : \[P(X \leqslant 19) \approx 0,1453\] Donc, \[P(X \geqslant 20) \approx 1 - 0,1453 = 0,8547\] Arrondie au millième, la probabilité est d’environ 0,855.
- Calculer l’espérance \(E(X)\) et interpréter le résultat dans le contexte de l’exercice.
AstuceRappel : Espérance d’une loi binomialeSi une variable aléatoire \(X\) suit une loi binomiale \(\mathcal{B}(n, p)\), son espérance est donnée par : \(E(X) = n \times p\).
Pour \(X \sim \mathcal{B}(100 \,;\, 0,24)\), l’espérance est : \[E(X) = 100 \times 0,24 = 24\] Interprétation : L’espérance représente la valeur moyenne que l’on peut espérer obtenir si l’on répète l’expérience (le tirage d’un échantillon de 100 personnes) un grand nombre de fois.
Ainsi, sur un grand nombre d’échantillons de 100 personnes, on peut s’attendre à ce qu’en moyenne, 24 personnes n’aient chuté au cours d’aucune des deux séances.
Partie B
Déterminer l’espérance \(E(T)\) de la variable aléatoire \(T\). Interpréter le résultat dans le contexte de l’exercice.
La variable aléatoire \(T\) est définie comme la somme des variables aléatoires \(T_1\) et \(T_2\), soit \(T = T_1 + T_2\).
AstuceRappel : Linéarité de l’espérancePour deux variables aléatoires \(X\) et \(Y\), l’espérance de leur somme est la somme de leurs espérances : \[E(X+Y) = E(X) + E(Y)\] Cette propriété est toujours vraie, que les variables soient indépendantes ou non.
En appliquant cette propriété, on obtient : \[E(T) = E(T_1 + T_2) = E(T_1) + E(T_2)\] En utilisant les valeurs données dans l’énoncé : \[E(T) = 40 + 60 = 100\] Interprétation : L’espérance de \(T\) représente le temps d’attente total moyen. En moyenne, une personne choisie au hasard attendra 100 minutes au total sur l’ensemble du week-end pour accéder aux activités sportives.
Montrer que la variance \(V(T)\) de la variable aléatoire \(T\) est égale à 356.
AstuceRappel : Variance d’une somme de variables indépendantesSi deux variables aléatoires \(X\) et \(Y\) sont indépendantes, la variance de leur somme est la somme de leurs variances : \[V(X+Y) = V(X) + V(Y)\] De plus, la variance est le carré de l’écart-type : \(V(X) = (\sigma(X))^2\).
L’énoncé précise que les variables aléatoires \(T_1\) et \(T_2\) sont indépendantes. On peut donc appliquer la formule de la variance d’une somme.
Nous devons d’abord calculer les variances de \(T_1\) et \(T_2\) à partir de leurs écarts-types :
- \(V(T_1) = (\sigma(T_1))^2 = 10^2 = 100\)
- \(V(T_2) = (\sigma(T_2))^2 = 16^2 = 256\)
On peut maintenant calculer la variance de \(T\) : \[V(T) = V(T_1) + V(T_2) = 100 + 256 = 356\] On a bien montré que \(V(T) = 356\).
À l’aide de l’inégalité de Bienaymé-Tchebychev, montrer que la probabilité que le temps total d’attente \(T\) soit strictement compris entre 60 et 140 minutes est supérieure à 0,77.
AstuceRappel : Inégalité de Bienaymé-TchebychevPour une variable aléatoire \(X\) d’espérance \(E(X)\) et de variance \(V(X)\), et pour tout réel \(\delta > 0\), l’inégalité s’écrit : \[P(|X - E(X)| \geqslant\delta) \le \frac{V(X)}{\delta^2}\] La forme complémentaire, souvent plus utile pour borner une probabilité d’être proche de la moyenne, est : \[P(|X - E(X)| < \delta) \geqslant1 - \frac{V(X)}{\delta^2}\]
On cherche à minorer la probabilité \(P(60 < T < 140)\). Nous avons calculé \(E(T) = 100\) et \(V(T) = 356\).
L’intervalle \(]60, 140[\) est centré sur l’espérance \(E(T)=100\). On peut le réécrire sous la forme \(|T - E(T)| < \delta\).
\(60 < T < 140 \Leftrightarrow 60 - 100 < T - 100 < 140 - 100\)
\(\Leftrightarrow -40 < T - 100 < 40\)
\(\Leftrightarrow |T - 100| < 40\)
L’événement est donc \(|T - E(T)| < 40\), ce qui correspond à la forme de l’inégalité de Bienaymé-Tchebychev avec \(\delta = 40\).
Appliquons la forme complémentaire de l’inégalité : \[P(|T - 100| < 40) \geqslant1 - \frac{V(T)}{40^2}\] En remplaçant par les valeurs connues : \[P(60 < T < 140) \geqslant1 - \frac{356}{40^2}\] \[P(60 < T < 140) \geqslant1 - \frac{356}{1600}\] Calculons la valeur du minorant : \[1 - \frac{356}{1600} = 1 - 0,2225 = 0,7775\] On a donc : \[P(60 < T < 140) \geqslant0,7775\] Puisque \(0,7775 > 0,77\), on a bien montré que la probabilité que le temps total d’attente soit strictement compris entre 60 et 140 minutes est supérieure à 0,77.
Corrigé de l’exercice 2
Partie A
Montrer que les droites \(d\) et \(d'\) sont sécantes au point \(S(-\frac{1}{2} \,;\, 1 \,;\, 4)\).
Pour montrer que les droites \(d\) et \(d'\) sont sécantes au point \(S\), nous devons vérifier deux conditions :
- Le point \(S\) appartient à la droite \(d\).
- Le point \(S\) appartient à la droite \(d'\).
- Les droites ne sont pas parallèles.
Vérifions si \(S\) appartient à \(d\) :
On remplace les coordonnées de \(S\) dans la représentation paramétrique de \(d\) et on vérifie s’il existe une valeur unique du paramètre \(t\). \[ \begin{cases} -\frac{1}{2} = \frac{3}{2} + 2t \\ 1 = 2 + t \\ 4 = 3 - t \end{cases} \Leftrightarrow \begin{cases} 2t = -\frac{1}{2} - \frac{3}{2} = -2 \\ t = 1 - 2 = -1 \\ t = 3 - 4 = -1 \end{cases} \Leftrightarrow \begin{cases} t = -1 \\ t = -1 \\ t = -1 \end{cases} \] Le système a une solution unique \(t=-1\). Le point \(S\) appartient donc à la droite \(d\).
Vérifions si \(S\) appartient à \(d'\) :
On procède de même avec la représentation paramétrique de \(d'\). \[ \begin{cases} -\frac{1}{2} = s \\ 1 = \frac{3}{2} + s \\ 4 = 3 - 2s \end{cases} \Leftrightarrow \begin{cases} s = -\frac{1}{2} \\ s = 1 - \frac{3}{2} = -\frac{1}{2} \\ 2s = 3 - 4 = -1 \Rightarrow s = -\frac{1}{2} \end{cases} \] Le système a une solution unique \(s=-\frac{1}{2}\). Le point \(S\) appartient donc à la droite \(d'\).
Vérifions si les droites sont parallèles :
Un vecteur directeur de \(d\) est \(\overrightarrow{u}(2 \,;\, 1 \,;\, -1)\).
Un vecteur directeur de \(d'\) est \(\overrightarrow{v}(1 \,;\, 1 \,;\, -2)\).
Les coordonnées de ces vecteurs ne sont pas proportionnelles (par exemple, \(2/1 = 2\) mais \(1/1 = 1\)). Les vecteurs \(\overrightarrow{u}\) et \(\overrightarrow{v}\) ne sont donc pas colinéaires. Par conséquent, les droites \(d\) et \(d'\) ne sont pas parallèles.
Puisque les droites \(d\) et \(d'\) ne sont pas parallèles et ont un point commun \(S\), elles sont sécantes en \(S\).
Étude du plan (ABC).
- Montrer que le vecteur \(\overrightarrow{n}(1 \,;\, 2 \,;\, 4)\) est un vecteur normal au plan (ABC).
AstuceRappel : Vecteur normal à un planUn vecteur \(\overrightarrow{n}\) est normal à un plan \((P)\) s’il est orthogonal à deux vecteurs non colinéaires de ce plan. On utilise le produit scalaire pour vérifier l’orthogonalité.
On considère les points \(A(-1 \,;\, 2 \,;\, 1)\), \(B(1 \,;\, -1 \,;\, 2)\) et \(C(1 \,;\, 1 \,;\, 1)\).
On calcule les coordonnées des vecteurs \(\overrightarrow{AB}\) et \(\overrightarrow{AC}\) :
\(\overrightarrow{AB}(1 - (-1) \,;\, -1 - 2 \,;\, 2 - 1)\), soit \(\overrightarrow{AB}(2 \,;\, -3 \,;\, 1)\).
\(\overrightarrow{AC}(1 - (-1) \,;\, 1 - 2 \,;\, 1 - 1)\), soit \(\overrightarrow{AC}(2 \,;\, -1 \,;\, 0)\).
Les coordonnées de \(\overrightarrow{AB}\) et \(\overrightarrow{AC}\) ne sont pas proportionnelles, les vecteurs ne sont donc pas colinéaires et définissent bien le plan (ABC).
Calculons les produits scalaires de \(\overrightarrow{n}\) avec ces deux vecteurs :
\(\overrightarrow{n} \cdot \overrightarrow{AB} = 1 \times 2 + 2 \times (-3) + 4 \times 1 = 2 - 6 + 4 = 0\).
\(\overrightarrow{n} \cdot \overrightarrow{AC} = 1 \times 2 + 2 \times (-1) + 4 \times 0 = 2 - 2 + 0 = 0\).
Le vecteur \(\overrightarrow{n}\) est orthogonal à deux vecteurs non colinéaires du plan (ABC), il est donc bien un vecteur normal à ce plan.
- En déduire qu’une équation cartésienne du plan (ABC) est : \(x + 2y + 4z - 7 = 0\).
Puisque \(\overrightarrow{n}(1 \,;\, 2 \,;\, 4)\) est un vecteur normal au plan (ABC), une équation cartésienne de ce plan est de la forme \(1x + 2y + 4z + d = 0\).
Pour déterminer la constante \(d\), on utilise le fait que le point \(A(-1 \,;\, 2 \,;\, 1)\) appartient au plan. Ses coordonnées doivent vérifier l’équation :
\((-1) + 2(2) + 4(1) + d = 0\)
\(-1 + 4 + 4 + d = 0\)
\(7 + d = 0\)
\(d = -7\)
Une équation cartésienne du plan (ABC) est donc bien \(x + 2y + 4z - 7 = 0\).
- Démontrer que les points A, B, C et S ne sont pas coplanaires.
Pour démontrer que les quatre points ne sont pas coplanaires, il suffit de montrer que le point \(S\) n’appartient pas au plan (ABC).
On utilise les coordonnées de \(S(-\frac{1}{2} \,;\, 1 \,;\, 4)\) et l’équation du plan (ABC).
\(x_S + 2y_S + 4z_S - 7 = (-\frac{1}{2}) + 2(1) + 4(4) - 7\)
\(= -0,5 + 2 + 16 - 7\)
\(= 10,5\)
Comme \(10,5 \neq 0\), les coordonnées de \(S\) ne vérifient pas l’équation du plan (ABC). Le point \(S\) n’appartient donc pas à ce plan.
Par conséquent, les points A, B, C et S ne sont pas coplanaires.
Projection orthogonale.
- Démontrer que le point \(H(-1 \,;\, 0 \,;\, 2)\) est le projeté orthogonal de \(S\) sur le plan (ABC).
Pour que \(H\) soit le projeté orthogonal de \(S\) sur le plan (ABC), deux conditions doivent être réunies :
- Le point \(H\) doit appartenir au plan (ABC).
- Le vecteur \(\overrightarrow{SH}\) doit être colinéaire au vecteur normal \(\overrightarrow{n}\) du plan.
Condition 1 :
Vérifions si les coordonnées de \(H(-1 \,;\, 0 \,;\, 2)\) satisfont l’équation du plan (ABC) :
\(x_H + 2y_H + 4z_H - 7 = (-1) + 2(0) + 4(2) - 7 = -1 + 0 + 8 - 7 = 0\).
Le point \(H\) appartient bien au plan (ABC).
Condition 2 :
Calculons les coordonnées du vecteur \(\overrightarrow{SH}\) avec \(S(-\frac{1}{2} \,;\, 1 \,;\, 4)\) :
\(\overrightarrow{SH}(-1 - (-\frac{1}{2}) \,;\, 0 - 1 \,;\, 2 - 4)\), soit \(\overrightarrow{SH}(-\frac{1}{2} \,;\, -1 \,;\, -2)\).
Le vecteur normal est \(\overrightarrow{n}(1 \,;\, 2 \,;\, 4)\).
On observe que \(1 = -2 \times (-\frac{1}{2})\), \(2 = -2 \times (-1)\) et \(4 = -2 \times (-2)\).
On a donc \(\overrightarrow{n} = -2 \overrightarrow{SH}\), ce qui montre que les vecteurs \(\overrightarrow{n}\) et \(\overrightarrow{SH}\) sont colinéaires.
Les deux conditions étant vérifiées, le point \(H\) est bien le projeté orthogonal de \(S\) sur le plan (ABC).
- En déduire qu’il n’existe aucun point \(M\) du plan (ABC) tel que \(SM < \frac{\sqrt{21}}{2}\).
AstuceRappel : Distance d’un point à un planLa distance d’un point \(S\) à un plan \((P)\) est la plus courte distance entre \(S\) et n’importe quel point \(M\) de \((P)\). Cette distance minimale est atteinte au projeté orthogonal \(H\) de \(S\) sur \((P)\). On a donc \(d(S, (P)) = SH\) et pour tout point \(M \in (P)\), \(SM \geqslant SH\).
La distance du point \(S\) au plan (ABC) est la distance \(SH\). Calculons cette distance :
\(SH = ||\overrightarrow{SH}|| = \sqrt{(-\frac{1}{2})^2 + (-1)^2 + (-2)^2}\)
\(SH = \sqrt{\frac{1}{4} + 1 + 4} = \sqrt{\frac{1}{4} + \frac{4}{4} + \frac{16}{4}} = \sqrt{\frac{21}{4}} = \frac{\sqrt{21}}{2}\).
Pour tout point \(M\) appartenant au plan (ABC), la distance \(SM\) est supérieure ou égale à la distance du point \(S\) au plan, c’est-à-dire \(SM \geqslant SH\).
On a donc pour tout point \(M\) du plan (ABC), \(SM \geqslant \frac{\sqrt{21}}{2}\).
Il n’existe par conséquent aucun point \(M\) du plan (ABC) pour lequel la distance \(SM\) serait strictement inférieure à \(\frac{\sqrt{21}}{2}\).
Partie B
Déterminer les coordonnées du point \(M\) en fonction de \(k\).
Le point \(M\) est défini par la relation vectorielle \(\overrightarrow{CM} = k \overrightarrow{CS}\) avec \(M(x_M, y_M, z_M)\), \(C(1,1,1)\) et \(S(-\frac{1}{2},1,4)\).
Calculons les coordonnées du vecteur \(\overrightarrow{CS}\) :
\(\overrightarrow{CS}(-\frac{1}{2} - 1 \,;\, 1 - 1 \,;\, 4 - 1)\), soit \(\overrightarrow{CS}(-\frac{3}{2} \,;\, 0 \,;\, 3)\).
La relation \(\overrightarrow{CM} = k \overrightarrow{CS}\) se traduit en coordonnées :
\(\begin{cases} x_M - x_C = k \times (-\frac{3}{2}) \\ y_M - y_C = k \times 0 \\ z_M - z_C = k \times 3 \end{cases} \Leftrightarrow \begin{cases} x_M - 1 = -\frac{3}{2}k \\ y_M - 1 = 0 \\ z_M - 1 = 3k \end{cases} \Leftrightarrow \begin{cases} x_M = 1 - \frac{3}{2}k \\ y_M = 1 \\ z_M = 1 + 3k \end{cases}\)
Les coordonnées de \(M\) sont donc \((1 - \frac{3}{2}k \,;\, 1 \,;\, 1 + 3k)\).
Existe-t-il un point \(M\) sur le segment \([CS]\) tel que le triangle \(MAB\) soit rectangle en \(M\) ?
Le triangle \(MAB\) est rectangle en \(M\) si et seulement si les vecteurs \(\overrightarrow{MA}\) et \(\overrightarrow{MB}\) sont orthogonaux, c’est-à-dire si leur produit scalaire est nul : \(\overrightarrow{MA} \cdot \overrightarrow{MB} = 0\).
Exprimons les coordonnées des vecteurs \(\overrightarrow{MA}\) et \(\overrightarrow{MB}\) en fonction de \(k\) :
\(A(-1, 2, 1)\) et \(B(1, -1, 2)\).
\(\overrightarrow{MA}(x_A - x_M \,;\, y_A - y_M \,;\, z_A - z_M)\)
\(\overrightarrow{MA}(-1 - (1 - \frac{3}{2}k) \,;\, 2 - 1 \,;\, 1 - (1 + 3k)) = (-2 + \frac{3}{2}k \,;\, 1 \,;\, -3k)\).
\(\overrightarrow{MB}(x_B - x_M \,;\, y_B - y_M \,;\, z_B - z_M)\)
\(\overrightarrow{MB}(1 - (1 - \frac{3}{2}k) \,;\, -1 - 1 \,;\, 2 - (1 + 3k)) = (\frac{3}{2}k \,;\, -2 \,;\, 1 - 3k)\).
Calculons le produit scalaire :
\(\overrightarrow{MA} \cdot \overrightarrow{MB} = (-2 + \frac{3}{2}k)(\frac{3}{2}k) + (1)(-2) + (-3k)(1 - 3k)\)
\(= -3k + \frac{9}{4}k^2 - 2 - 3k + 9k^2\)
\(= \frac{9}{4}k^2 + \frac{36}{4}k^2 - 6k - 2\)
\(= \frac{45}{4}k^2 - 6k - 2\)
On résout l’équation \(\frac{45}{4}k^2 - 6k - 2 = 0\).
C’est une équation du second degré de la forme \(ak^2+bk+c=0\).
Le discriminant est \(\Delta = b^2 - 4ac = (-6)^2 - 4(\frac{45}{4})(-2) = 36 + 90 = 126\).
\(\Delta > 0\), l’équation a deux solutions réelles :
\(k_1 = \frac{-b - \sqrt{\Delta}}{2a} = \frac{6 - \sqrt{126}}{2 \times \frac{45}{4}} = \frac{6 - \sqrt{9 \times 14}}{45/2} = \frac{6 - 3\sqrt{14}}{45/2} = \frac{2(6 - 3\sqrt{14})}{45} = \frac{12 - 6\sqrt{14}}{45} = \frac{4 - 2\sqrt{14}}{15}\).
\(k_2 = \frac{-b + \sqrt{\Delta}}{2a} = \frac{6 + \sqrt{126}}{45/2} = \frac{6 + 3\sqrt{14}}{45/2} = \frac{12 + 6\sqrt{14}}{45} = \frac{4 + 2\sqrt{14}}{15}\).
Le point \(M\) doit appartenir au segment \([CS]\), ce qui impose que le réel \(k\) appartienne à l’intervalle \([0 \,;\, 1]\).
Étudions \(k_1\):
On sait que \(3 < \sqrt{14} < 4\), donc \(6 < 2\sqrt{14} < 8\).
Ainsi, \(4 - 2\sqrt{14} < 4 - 6 = -2\). Le numérateur est négatif, donc \(k_1 < 0\). Cette solution n’est pas dans \([0 \,;\, 1]\).
Étudions \(k_2\):
\(k_2\) est clairement positif. Vérifions si \(k_2 \leqslant 1\).
\(k_2 \leqslant 1 \Leftrightarrow \frac{4 + 2\sqrt{14}}{15} \leqslant 1 \Leftrightarrow 4 + 2\sqrt{14} \leqslant 15 \Leftrightarrow 2\sqrt{14} \leqslant 11\).
Comme les deux membres sont positifs, on peut élever au carré :
\((2\sqrt{14})^2 \leqslant 11^2 \Leftrightarrow 4 \times 14 \leqslant 121 \Leftrightarrow 56 \leqslant 121\).
Cette inégalité est vraie. On a donc \(0 < k_2 \leqslant 1\).
Il existe une unique valeur \(k = \frac{4 + 2\sqrt{14}}{15}\) dans l’intervalle \([0 \,;\, 1]\) pour laquelle le triangle \(MAB\) est rectangle en \(M\).
Par conséquent, oui, il existe un tel point \(M\) sur le segment \([CS]\).
Corrigé de l’exercice 3
Cet exercice est de type vrai/faux où chaque affirmation doit être validée ou invalidée par une justification.
Affirmation 1 : La suite \((u_n)\) définie pour tout entier naturel \(n\) par \(u_n = \frac{1+5^n}{2+3^n}\) converge vers \(\frac{5}{3}\).
FAUSSE
Justification : Nous cherchons la limite de la suite \((u_n)\) en \(+\infty\). Nous sommes face à une forme indéterminée du type « \(\frac{\infty}{\infty}\) ». Dans le cas de sommes de termes avec des puissances de \(n\), la méthode consiste à factoriser par le terme qui croît le plus rapidement (le terme dominant). Ici, le terme dominant est \(5^n\) car \(5 > 3\).
On factorise donc le numérateur et le dénominateur par \(5^n\) : \[u_n = \frac{5^n \left( \frac{1}{5^n} + 1 \right)}{5^n \left( \frac{2}{5^n} + \frac{3^n}{5^n} \right)}\] Pour tout \(n \in \mathbb{N}\), \(5^n \neq 0\), on peut donc simplifier : \[u_n = \frac{\frac{1}{5^n} + 1}{\frac{2}{5^n} + \left(\frac{3}{5}\right)^n}\]
AstuceRappel : Limite d’une suite géométriqueLa limite de la suite \((q^n)\) dépend de la valeur de la raison \(q\) :
- Si \(-1 < q < 1\), alors \(\lim_{n \to +\infty} q^n = 0\).
- Si \(q > 1\), alors \(\lim_{n \to +\infty} q^n = +\infty\).
Étudions la limite de chaque terme :
- On a \(5>1\), donc \(\lim_{n \to +\infty} 5^n = +\infty\), et par conséquent \(\lim_{n \to +\infty} \frac{1}{5^n} = 0\).
- De même, \(\lim_{n \to +\infty} \frac{2}{5^n} = 0\).
- Pour le terme \(\left(\frac{3}{5}\right)^n\), la raison est \(q = \frac{3}{5}\).
Comme \(-1 < \frac{3}{5} < 1\), on a \(\lim_{n \to +\infty} \left(\frac{3}{5}\right)^n = 0\).
On peut maintenant calculer la limite du numérateur et du dénominateur par somme des limites :
- \(\lim_{n \to +\infty} \left(\frac{1}{5^n} + 1\right) = 0 + 1 = 1\).
- \(\lim_{n \to +\infty} \left(\frac{2}{5^n} + \left(\frac{3}{5}\right)^n\right) = 0 + 0 = 0\).
Le quotient a donc une limite infinie. Pour déterminer s’il s’agit de \(+\infty\) ou \(-\infty\), il faut connaître le signe du dénominateur. Pour tout entier naturel \(n\), \(5^n > 0\) et \(3^n > 0\), donc le dénominateur \(\frac{2}{5^n} + (\frac{3}{5})^n\) est une somme de termes strictement positifs. Il tend donc vers 0 par valeurs positives (\(0^+\)).
Finalement, par quotient des limites : \[\lim_{n \to +\infty} u_n = +\infty\]
La suite \((u_n)\) diverge vers \(+\infty\), elle ne converge donc pas vers \(\frac{5}{3}\). L’affirmation est fausse.
Affirmation 2 : On considère la suite \((w_n)\) définie par \(w_0=0\) et, pour tout entier naturel \(n\), \(w_{n+1} = 3w_n - 2n + 3\). Pour tout entier naturel \(n\), on a \(w_n \geqslant n\).
VRAIE
Justification :
Nous allons démontrer cette propriété par récurrence. Soit \(P(n)\) la proposition : « \(w_n \geqslant n\) ».
Initialisation :
Pour \(n=0\), on a \(w_0=0\). La proposition \(P(0)\) est \(w_0 \geqslant 0\), soit \(0 \geqslant 0\), ce qui est vrai. \(P(0)\) est initialisée.
Hérédité :
Supposons qu’il existe un entier \(k \geqslant 0\) tel que \(P(k)\) est vraie, c’est-à-dire \(w_k \geqslant k\) (hypothèse de récurrence).
Montrons que \(P(k+1)\) est vraie, c’est-à-dire \(w_{k+1} \geqslant k+1\).
Par définition de la suite, \(w_{k+1} = 3w_k - 2k + 3\).
D’après l’hypothèse de récurrence, \(w_k \geqslant k\), donc \(3w_k \geqslant 3k\).
En injectant cette inégalité dans l’expression de \(w_{k+1}\), on obtient : \[w_{k+1} \geqslant 3k - 2k + 3\] \[w_{k+1} \geqslant k + 3\] Nous voulons montrer que \(w_{k+1} \geqslant k+1\). Or, pour tout entier \(k \geqslant 0\), on a \(k+3 \geqslant k+1\).
Puisque \(w_{k+1} \geqslant k+3\) et que \(k+3 \geqslant k+1\), on peut conclure par transitivité que : \[w_{k+1} \geqslant k+1\] La proposition \(P(k+1)\) est donc vraie.
Conclusion : La proposition est initialisée pour \(n=0\) et est héréditaire. Par le principe de récurrence, on peut affirmer que pour tout entier naturel \(n\), \(w_n \geqslant n\).
Affirmation 3 : D’après le graphique, la fonction \(f\) est convexe sur son ensemble de définition.
FAUSSE
Justification :
AstuceRappel : Convexité et position relative de la courbe et des tangentesUne fonction est dite convexe sur un intervalle si sa courbe représentative est située au-dessus de chacune de ses tangentes sur cet intervalle. Elle est dite concave si sa courbe est située en dessous de chacune de ses tangentes.
Le graphique (Fig. 1) montre la courbe \(C_f\) et sa tangente \(T\) au point A d’abscisse 8.
On observe que, au voisinage du point A, la courbe \(C_f\) est située en dessous de sa tangente \(T\).
Ceci est la caractéristique d’une fonction concave. Puisqu’il existe au moins une tangente (la tangente \(T\)) telle que la courbe n’est pas entièrement au-dessus d’elle, la fonction \(f\) n’est pas convexe sur son ensemble de définition \(]0; +\infty[\).
L’affirmation est donc fausse.
Affirmation 4 : Pour tout réel \(x > 0\), \(\ln(x) - x + 1 \leqslant 0\).
VRAIE
Justification : Pour étudier le signe de l’expression, nous pouvons étudier les variations de la fonction \(g\) définie sur l’intervalle \(]0; +\infty[\) par \(g(x) = \ln(x) - x + 1\).
La fonction \(g\) est dérivable sur \(]0; +\infty[\) comme somme de fonctions dérivables sur cet intervalle. \[g'(x) = \frac{1}{x} - 1\] Étudions le signe de la dérivée \(g'(x)\) : \[g'(x) > 0 \Leftrightarrow \frac{1}{x} - 1 > 0 \Leftrightarrow \frac{1}{x} > 1\] Comme \(x > 0\), on peut multiplier par \(x\) sans changer le sens de l’inégalité : \[1 > x\] Ainsi, \(g'(x) > 0\) pour \(x \in ]0, 1[\) et \(g'(x) < 0\) pour \(x \in ]1, +\infty[\). La dérivée s’annule en \(x=1\).
On peut dresser le tableau de variation de la fonction \(g\) :
\(x\) 0 1 \(+\infty\) \(g'(x)\) + 0 - \(g(x)\) ↗ \(g(1)\) ↘ La fonction \(g\) admet donc un maximum global sur \(]0; +\infty[\) atteint en \(x=1\).
Calculons la valeur de ce maximum :
\[g(1) = \ln(1) - 1 + 1 = 0 - 1 + 1 = 0\]
Le maximum de la fonction \(g\) sur son ensemble de définition est 0. Par conséquent, pour tout \(x \in ]0; +\infty[\), on a \(g(x) \leqslant g(1)\), ce qui signifie :
\[\ln(x) - x + 1 \leqslant 0\]
L’affirmation est donc vraie.
Corrigé de l’exercice 4
Partie A : Étude graphique
Dans cette partie, aucune justification n’est attendue.
Par lecture graphique, on cherche l’abscisse \(t\) du point de la courbe \(C_d\) ayant pour ordonnée 15. On trouve que le chariot aura parcouru 15 m au bout d’environ 2 secondes.
La longueur totale de la zone de freinage correspond à la distance maximale parcourue par le chariot, c’est-à-dire à la limite de la fonction \(d\) en \(+\infty\). Graphiquement, cela correspond à l’ordonnée de l’asymptote horizontale \(\Delta\) à la courbe \(C_d\).
On lit que l’équation de l’asymptote \(\Delta\) est \(y=22,8\).
La longueur minimale à prévoir pour la zone de freinage est donc de 22,8 mètres.
La valeur \(d'(4,7)\) correspond au coefficient directeur de la tangente à la courbe \(C_d\) au point \(A\) d’abscisse \(t=4,7\). Cette tangente est la droite \(T\) tracée sur le graphique.
Pour estimer ce coefficient directeur, on choisit deux points sur la droite \(T\). Prenons le point \(A(4,7 \,;\, 21)\) et un autre point, par exemple le point de coordonnées approximatives \((0 \,;\, 16,3)\).
Le coefficient directeur est : \[m = \frac{y_B - y_A}{x_B - x_A} \approx \frac{21 - 16,3}{4,7 - 0} = \frac{4,7}{4,7} = 1\] On peut arrondir la valeur à \(d'(4,7) \approx 1\).
Interprétation : La fonction dérivée \(d'(t)\) représente la vitesse instantanée du chariot, notée \(v(t)\). Ainsi, à l’instant \(t=4,7\) secondes, la vitesse du chariot est d’environ 1 m/s.
Partie B : Étude de la vitesse
Résolution de l’équation différentielle \((E') : y' + 0,6y = 0\).
Cette équation est de la forme \(y' = ay\) avec \(a = -0,6\).
AstuceRappel : Équation différentielle \(y' = ay\)Les solutions de l’équation différentielle \(y' = ay\), où \(a\) est un réel, sont les fonctions définies sur \(\mathbb{R}\) par \(t \mapsto Ce^{at}\), où \(C\) est une constante réelle quelconque.
Les solutions de l’équation \((E')\) sur \([0; +\infty[\) sont donc les fonctions de la forme \(t \mapsto Ce^{-0,6t}\), avec \(C \in \mathbb{R}\).
Vérification d’une solution particulière pour \((E)\).
Soit \(g(t) = te^{-0,6t}\). La fonction \(g\) est un produit de fonctions dérivables sur \([0; +\infty[\), elle est donc dérivable.
Pour dériver \(g(t)\), on utilise la formule \((uv)' = u'v + uv'\) avec \(u(t)=t\) et \(v(t)=e^{-0,6t}\). \(u'(t)=1\) et \(v'(t)=-0,6e^{-0,6t}\).
\(g'(t) = 1 \times e^{-0,6t} + t \times (-0,6e^{-0,6t}) = e^{-0,6t} - 0,6te^{-0,6t}\).
Vérifions si \(g\) est solution de \((E) : y' + 0,6y = e^{-0,6t}\).
\(g'(t) + 0,6g(t) = (e^{-0,6t} - 0,6te^{-0,6t}) + 0,6(te^{-0,6t})\)
\(g'(t) + 0,6g(t) = e^{-0,6t} - 0,6te^{-0,6t} + 0,6te^{-0,6t} = e^{-0,6t}\).
L’égalité est vérifiée, donc la fonction \(g\) est bien une solution de l’équation différentielle \((E)\).
Déduction des solutions de \((E)\).
La solution générale de l’équation différentielle \((E)\) est la somme de la solution générale de l’équation homogène associée \((E')\) et d’une solution particulière de \((E)\).
Les solutions de \((E)\) sont donc les fonctions de la forme :
\[y(t) = Ce^{-0,6t} + te^{-0,6t} = (C+t)e^{-0,6t}\]
où \(C\) est une constante réelle.
Détermination de la fonction \(v(t)\).
La fonction \(v\) est une solution de \((E)\), donc \(v(t) = (C+t)e^{-0,6t}\).
On sait que la vitesse initiale est \(v(0) = 12\). On utilise cette condition pour déterminer la constante \(C\).
\(v(0) = (C+0)e^{-0,6 \times 0} = C \times e^0 = C\).
On a donc \(C = 12\).
La fonction vitesse est donc définie pour tout \(t \in [0; +\infty[\) par :
\[v(t) = (12+t)e^{-0,6t}\]
Calcul de la dérivée \(v'(t)\).
La fonction \(v(t) = (12+t)e^{-0,6t}\) est un produit de fonctions.
En posant \(u(t)=12+t\) et \(w(t)=e^{-0,6t}\), on a \(u'(t)=1\) et \(w'(t)=-0,6e^{-0,6t}\).
\(v'(t) = u'(t)w(t) + u(t)w'(t) = 1 \times e^{-0,6t} + (12+t)(-0,6e^{-0,6t})\)
\(v'(t) = e^{-0,6t}(1 - 0,6(12+t)) = e^{-0,6t}(1 - 7,2 - 0,6t)\)
\(v'(t) = (-6,2 - 0,6t)e^{-0,6t}\).
Limite de \(v\) en \(+\infty\).
On utilise l’expression \(v(t) = 12e^{-0,6t} + t \times \frac{1}{e^{0,6t}}\).
On sait que \(\lim_{t \to +\infty} -0,6t = -\infty\), donc par composition \(\lim_{t \to +\infty} e^{-0,6t} = 0\).
Pour le second terme, on peut écrire \(t \times \frac{1}{e^{0,6t}} = \frac{t}{e^{0,6t}} = \frac{1}{0,6} \times \frac{0,6t}{e^{0,6t}}\).
Par croissance comparée, on sait que \(\lim_{X \to +\infty} \frac{X}{e^X} = 0\).
En posant \(X=0,6t\), on a \(\lim_{t \to +\infty} \frac{0,6t}{e^{0,6t}} = 0\).
Ainsi, \(\lim_{t \to +\infty} t e^{-0,6t} = 0\).
Par somme des limites, on obtient :
\[\lim_{t \to +\infty} v(t) = 12 \times 0 + 0 = 0\]
Sens de variation de \(v\).
On étudie le signe de la dérivée \(v'(t) = (-6,2 - 0,6t)e^{-0,6t}\) sur \([0; +\infty[\).
Pour tout \(t \geqslant 0\), \(e^{-0,6t}\) est strictement positif.
Le signe de \(v'(t)\) est donc celui de \((-6,2 - 0,6t)\).
Pour \(t \geqslant 0\), on a \(0,6t \geqslant 0\), donc \(-0,6t \leqslant 0\).
Ainsi, \(-6,2 - 0,6t \leqslant -6,2 < 0\).
La dérivée \(v'(t)\) est donc strictement négative sur \([0; +\infty[\).
La fonction \(v\) est strictement décroissante sur \([0; +\infty[\).
On dresse le tableau de variation complet :
\(v(0) = (12+0)e^0 = 12\).
\(t\) 0 \(+\infty\) \(v'(t)\) - \(v(t)\) 12 ↘ 0 Résolution de l’équation \(v(t)=1\).
La fonction \(v\) est continue (car dérivable) et strictement décroissante sur l’intervalle \([0; +\infty[\).
De plus, \(v(0)=12\) et \(\lim_{t \to +\infty} v(t) = 0\).
Le nombre 1 est compris dans l’intervalle image \(]0; 12]\).
D’après le corollaire du théorème des valeurs intermédiaires pour les fonctions strictement monotones, l’équation \(v(t)=1\) admet une solution unique \(\alpha\) sur l’intervalle \([0; +\infty[\).
À l’aide de la calculatrice, on peut trouver une valeur approchée de \(\alpha\).
En utilisant la fonction table ou un solveur, on trouve :
\(v(4,7) \approx 1,003\)
\(v(4,71) \approx 0,996\)
Une valeur approchée de \(\alpha\) au dixième est donc \(\alpha \approx 4,7\).
Le système mécanique d’arrêt se déclenche lorsque la vitesse est inférieure ou égale à 1 m/s. Comme la fonction \(v\) est strictement décroissante, la condition \(v(t) \leqslant 1\) est équivalente à \(v(t) \leqslant v(\alpha)\), ce qui signifie \(t \geqslant \alpha\).
Le système entre donc en action à partir de l’instant \(t=\alpha\).
Cela se produit au bout d’environ 4,7 secondes.
Partie C : Calcul de la distance parcourue
Démonstration par intégration par parties.
On doit calculer \(d(t) = \int_0^t v(x) dx = \int_0^t (12+x)e^{-0,6x} dx\).
AstuceRappel : Intégration par partiesSi \(u\) et \(f\) sont deux fonctions dérivables sur un intervalle \(I\), alors pour tous \(a, b \in I\) : \(\int_a^b u(x)f'(x) dx = [u(x)f(x)]_a^b - \int_a^b u'(x)f(x) dx\).
On pose :
- \(u(x) = 12+x \quad \implies \quad u'(x) = 1\)
- \(f'(x) = e^{-0,6x} \quad \implies \quad f(x) = \frac{1}{-0,6}e^{-0,6x} = -\frac{5}{3}e^{-0,6x}\)
Appliquons la formule :
\(d(t) = \left[ (12+x)(-\frac{5}{3}e^{-0,6x}) \right]_0^t - \int_0^t 1 \times (-\frac{5}{3}e^{-0,6x}) dx\)
\(d(t) = \left( (12+t)(-\frac{5}{3}e^{-0,6t}) - (12+0)(-\frac{5}{3}e^0) \right) + \frac{5}{3} \int_0^t e^{-0,6x} dx\)
\(d(t) = (-\frac{5}{3}t - 20)e^{-0,6t} + 20 + \frac{5}{3} \left[ -\frac{5}{3}e^{-0,6x} \right]_0^t\)
\(d(t) = (-\frac{5}{3}t - 20)e^{-0,6t} + 20 + \frac{5}{3} \left( -\frac{5}{3}e^{-0,6t} - (-\frac{5}{3}e^0) \right)\)
\(d(t) = (-\frac{5}{3}t - 20)e^{-0,6t} + 20 - \frac{25}{9}e^{-0,6t} + \frac{25}{9}\)
\(d(t) = e^{-0,6t} (-\frac{5}{3}t - 20 - \frac{25}{9}) + (20 + \frac{25}{9})\)
\(d(t) = e^{-0,6t} (-\frac{15}{9}t - \frac{180}{9} - \frac{25}{9}) + (\frac{180}{9} + \frac{25}{9})\)
\(d(t) = e^{-0,6t} (-\frac{5}{3}t - \frac{205}{9}) + \frac{205}{9}\)
Ce qui est bien la formule demandée.
Le dispositif d’arrêt se déclenche à l’instant \(t=\alpha\) où la vitesse atteint 1 m/s. On cherche donc la distance parcourue à cet instant, soit \(d(\alpha)\).
On utilise la valeur approchée \(\alpha \approx 4,7\) obtenue précédemment.
On calcule \(d(4,7)\) : \[d(4,7) = e^{-0,6 \times 4,7} \left(-\frac{5}{3} \times 4,7 - \frac{205}{9}\right) + \frac{205}{9} \approx 20,95\]
Arrondie au centième, la distance parcourue par le chariot avant le déclenchement du dispositif est de 20,95 mètres.